Second-order Democratic Aggregation

Publication
Second-order Democratic Aggregation,
Tsung-Yu
Lin,
Subhransu Maji,
Piotr
Koniusz,
European Conference on Computer Vision (ECCV), 2018
[
paper +
supplementary,
bibtex,
code
]
Summary
We study the relationship between democratic pooling and
spectral normalization in the context of second-order features.
Both these approaches generate an orderless aggregate of a set of features
and were designed to equalize contributions in the aggregate
improving performance than sum pooling.
We present $\gamma$-democratic aggregators that interpolate between sum and
democratic pooling outperforming both and achieving comparable results to
the spectral normalization.
Moreover the $\gamma$-democratic aggregations
is computationally more efficient than spectral normalization
and can be computed in a low dimensional space using sketching allowing
the use of very high-dimensional second-order features which results in a
state-of-the-art performance on several datasets.
Orderless feature aggregation
Given a sequences of features
$\mathcal{X}=\{\mathbf{x}_1, \mathbf{x}_2, \cdots, \mathbf{x}_n\}$
encoded by $\phi(\mathbf{x})=\mathbf{x}\mathbf{x}^T$, the
outer-product encoder, we are interested in functions for
computing an orderless aggregation of the sequence to obtain a global
descriptor $\xi(\mathcal{X})$.
We study the following choices for computing $\xi(\mathcal{X})$
based on
sum pooling:
$$
\xi(\mathcal{X})=\sum_{\mathbf{x}\in\mathcal{X}}\phi(\mathbf{x}).
$$
Second-order pooling were shown to be effective for semantic
segmentation [Carreira et al.] and more recently for fine-grained recognition with
deep CNNs (e.g., bilinear CNNs [Lin et al.])
-
Democratic aggregation [Murray et al.] computes a weighted
combination of features:
$$
\xi(\mathcal{X})=\sum_{\mathbf{x}\in\mathcal{X}}\alpha(\mathbf{x})\phi(\mathbf{x})
$$
such that $\alpha(\mathbf{x})>0$ and satisfy:
$$
\alpha(\mathbf{x})\phi(\mathbf{x})^T\xi(\mathcal{X})=C, \quad \forall \mathbf{x} \in \mathcal{X}
$$
The above equation can be rewritten as:
$$
\texttt{diag}(\mathbf{\alpha})\mathbf{K}\texttt{diag}(\mathbf{\alpha})\mathbf{1}_n=C\mathbf{1}_n
$$
where $\mathbf{K}$ is the kernel matrix of the set $\mathcal{X}$
and $\mathbf{1}_n$ is a $n$-dimensional vector of ones. Although
the solution to the above may not exist for arbitrary kernels, we
show that with second-order features the solution always exists
as long as none of the features are trivial, i.e., all
zeros. Moreover the solution can be computed just as efficiently
as the first-order counterpart using the kernel trick (see paper
for details).
-
$\gamma$-democratic aggregation. We propose a simple
generalization of the above called $\gamma$-democratic
aggregation where the weights $\alpha(\mathbf{x})$ satisfy:
$$
\texttt{diag}(\mathbf{\alpha})\mathbf{K}\texttt{diag}(\mathbf{\alpha})\mathbf{1}_n=(\mathbf{K}\mathbf{1}_n)^\gamma
$$
where the right-hand side of the equation takes the
power of $\gamma$ in an elementwise manner.
One can interpolate between sum pooling ($\gamma=1$) and democratic aggregation ($\gamma=0$) by
adjusting the value of $\gamma$.
-
Sum pooling + matrix power normalization [Lin and Maji,
BMVC 17]. Let denote the matrix
$\mathbf{A}$ obtained after sum pooling
$\mathbf{A}=\sum\mathbf{x}\mathbf{x}^T=\mathbf{U}\mathbf{\Lambda}\mathbf{V}^T$.
Matrix power normalization rescales the spectrum to obtain the
final descriptor $\xi(\mathcal{X})$
$$
\xi(\mathcal{X})=\mathbf{A}^p=\Bigg(\sum_{\mathbf{x}\in\mathcal{X}}\mathbf{x}\mathbf{x}^T\Bigg)^p
=\mathbf{U}\mathbf{\Lambda}^p\mathbf{V}^T, \quad p<\text{1}
$$
Results
Equalizing feature contributions.
While seemingly different, both democratic aggregation and power
normalization aim at equalizing contributions among
features. Formally lets define the contribution of a feature
$\mathbf{x}$ as $C(\mathbf{x})$ given as
$$
C(\mathbf{x}) = \phi(\mathbf{x})^T\xi(\mathcal{X}).
$$
For democratic aggregation $C(\mathbf{x}) =
1/\alpha(\mathbf{x})$.
In the paper we show that the variance of the contributions for
the matrix normalization with a power $p$ satisfies
$$
\sigma^2 <
\frac{r^2_{\text{max}}\lambda_1^{2p}}{4\sum_{i}{\lambda_i^{2p}}},
$$
where $\{\lambda_i\}$ are eigenvalues in the descending order and $r_{\text{max}}$ is
the maximum squared radius of the data $\mathbf{x} \in
\mathcal{X}$.
The bound is minimized when $p=0$ which corresponds to
whitening. The figure below shows the contributions for various
pooling techniques. Both democratic aggregation (green) and
matrix power normalization (red) equalize feature contributions resulting in
flatter curves comparing to sum pooling (blue).
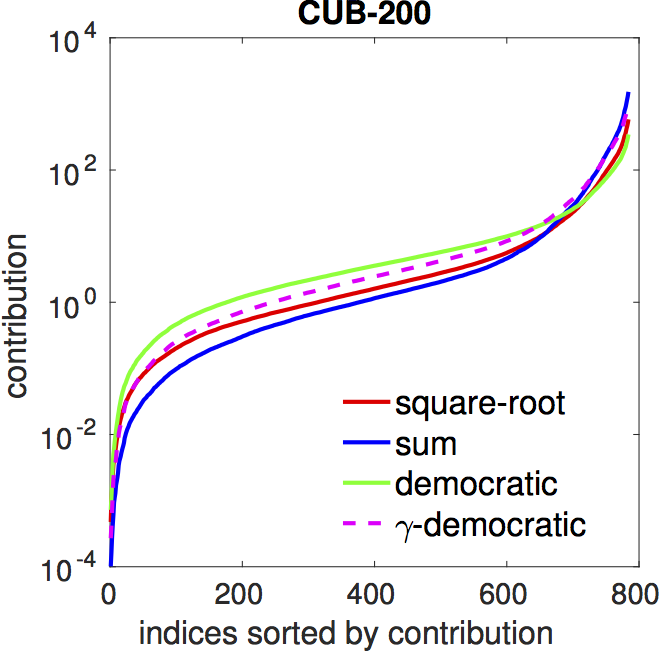 |
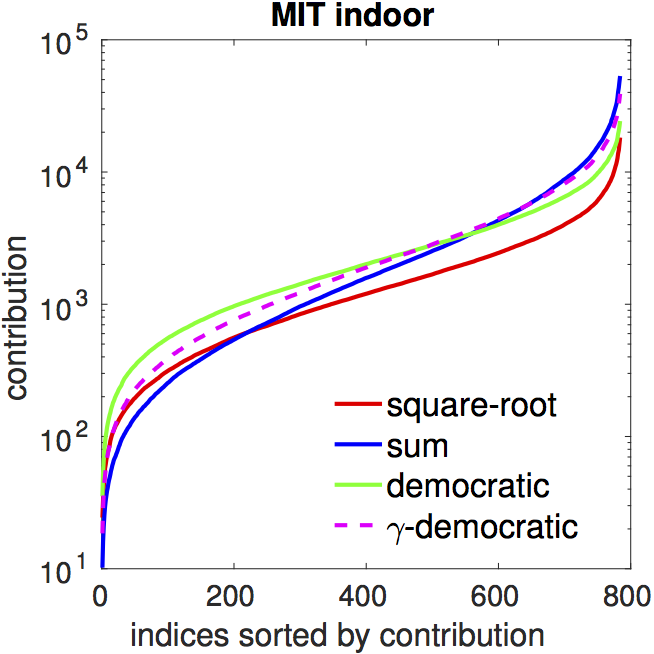 |
| contributions |
Flattening of the spectrum. Both democratic aggregation
(green) and
matrix power normalization (red) have a flatter spectrum compared
to that of sum pooling (blue).
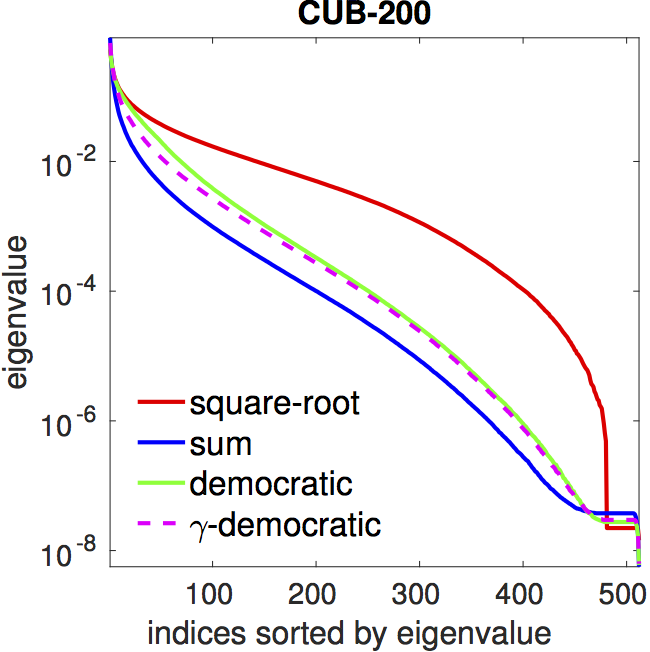 |
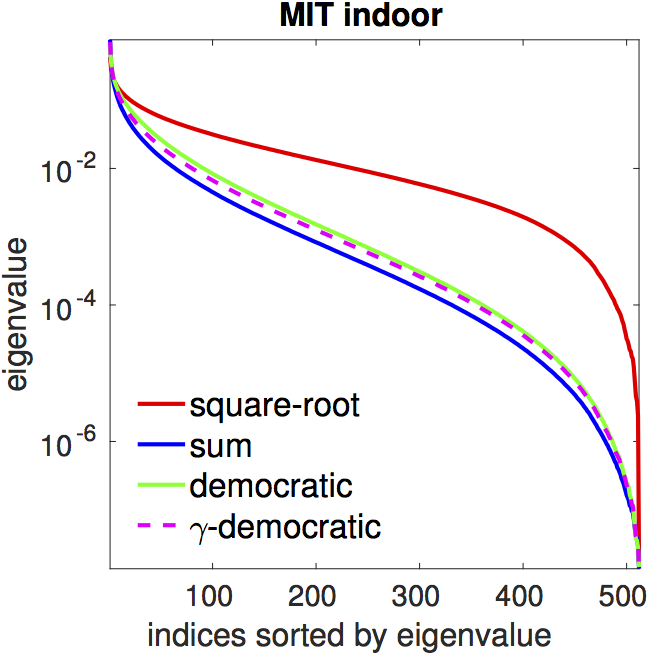 |
| spectrum
(eigenvalues) |
Effect of $\gamma$ on accuracy with $\gamma$-democratic aggregation.
The table below reports the accuracy using VGG-16 features on
various fine-grained and texture recognition datasets.
$\gamma$-democratic aggregation outperforms sum and
democratic aggregation, while matrix power normalization performs
best in most cases.
| Dataset |
Sum |
Democratic |
$\gamma$-democratic |
Matrix power normalization |
| Caltech UCSD Birds |
84.0 |
84.7 |
84.9 |
85.9 |
| Stanford Cars |
90.6 |
89.7 |
90.8 |
91.7 |
| FGVC Aircrafts |
85.7 |
86.7 |
86.7 |
87.6 |
| DTD† |
71.2 |
72.2 |
72.3 |
72.9 |
| FMD† |
84.6 |
82.8 |
84.6 |
85.0 |
| MIT Indoor |
79.5 |
79.6 |
80.4 |
80.9 |
† Results on DTD and FMD reported using a single random split.
Accuracy using ResNet features with tensor sketching.
Despite offering higher accuracy
matrix power normalization is computationally expensive and memory
intensive, even with iterative approximate methods.
In contrast, democratic pooling is computationally efficient and
can be combined with tensor sketching allowing the use of higher
dimensional features such as the 2048-dimensional ResNet
features. Naive second-order pooling with matrix normalization
would require 2048x2048 dimensional representations. The resulting
baseline beats or matches the state of the art on various datasets.
| Method |
MIT Indoor |
| Places-205 |
80.9 |
| Deep Filter Banks |
81.0 |
| Spectral Features |
84.3 |
| FASON |
81.7 |
| $\gamma$-democratic (ours) |
84.3 |
|
| Method |
FMD |
DTD |
| IFV+DeCAF |
65.5 ∓ 1.3 |
69.4 ∓ 1.2 |
| FV+FC+CNN |
82.2 ∓ 1.4 |
75.5 ∓ 0.8 |
| LFV |
82.1 ∓ 1.9 |
73.8 ∓ 1.0 |
| SMO Task |
82.3 ∓ 1.7 |
- |
| FASON |
82.1 ∓ 1.9 |
72.9 ∓ 0.7 |
| $\gamma$-democratic (ours) |
84.3 ∓ 1.5 |
76.2 ∓ 0.7 |
|
Acknowledgements
We acknowledge support from NSF (#1617917, #1749833)
and the MassTech Collaborative grant for funding the UMass GPU
cluster.
References
- Tsung-Yu Lin, Aruni RoyChowdhury, and Subhransu Maji,
"Bilinear CNNs for Fine-grained Visual Recognition", IEEE PAMI
2017
- Joao Carriera et al., "Semantic Segmentation with
Second-Order Pooling", ECCV 2012
- Tsung-Yu Lin, and Subhransu Maji, "Improved Bilinear
Pooling with CNNs", BMVC 2017
- Naila Murray, Hervé Jégou, Florent Perronnin,
and Andrew Zisserman, "Interferences in Match Kernels", IEEE
PAMI, 2017
- Piotr Koniusz, Hongguang Zhang, and Fatih Porikli,
"A Deeper Look at Power Normalizations", CVPR 2018
- Piotr Koniusz, Fei Yan, Philippe-Henri Gosselin, and Krystian Mikolajczyk,
"Higher-order Occurrence Pooling for Bags-of-Words: Visual Concept Detection",
IEEE PAMI 2016
