







Vision-Based Object Finding Application
Often people misplace their keys, cell phone, or other small, but important, objects somewhere in their home. While in some circumstances this problem is simply a nuisance, it is can be serious, especially for elders. Vision-based object detection is not only a challenge for researchers, but also an important tool in elder assistance. Compared with other widely-used techniques that use non-vision methods (e.g., RFID tag), a vision-based system is more flexible, intuitive, non-intrusive and easy to use.We developed an active multi-camera object finding module that supports finding a handheld object.
Objects are modeled by color, texture and local features. Three different methods are used together to perform the detection and recognition:
- Haar-like feature classifiers, provided by the Intel OpenCV libraries.
- David Lowe's SIFT features
- Color invariant feature

Functional scheme:
- Object detection
Objects are detected automatically (when an object is put in the scene).
The object is recognized and located by triangulation.
The category and location of the object is stored (for future queries).
- Object finding
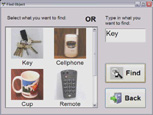
Receive finding query from user
Scan the scene using active cameras (if location of the query object has not been stored before)
Detect the query object in the sequential scene images
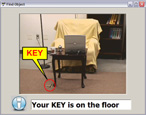
Report the location and scene image to the user
Demos
Find Keys Demo